动态力传感器校准装置(ECS-1225)
力可以分为静态力和动态力。相应的,力传感器也有两方面的特性,即静态特性和动态特性。静态特性一般是指传感器对于固定力值的一种响应,动态特性是指传感器对于随时间变化的输人量的响应特性。动态力测试场合有很多,例如:航天技术中对火箭和导弹在发射过程中动态推力的测试,飞机在飞行过程中发动机的动态推力,各种火炮弹道动态力的测试等
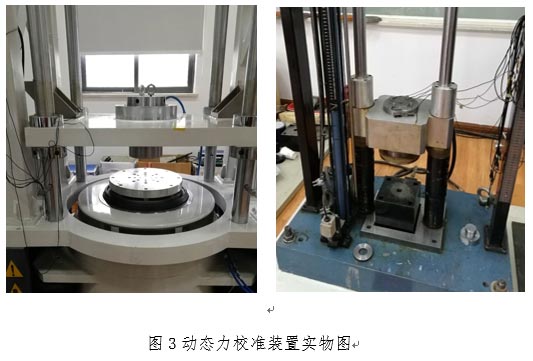
本公司自主研发的动态力传感器校准装置,提供了两种校准方法正弦力法和冲击法校准,校准项目包括动态幅值灵敏度、动态幅值灵敏度相对误差、相位延迟、灵敏度线性度等。通过测量多点加速度结合加速度修正因子,获得质量块上的等效加速度,利用质量块的加速度与质量的乘积来复现力值,将复现的力值与被校力传感器的测量结果进行对比来得到校准结果。
根据牛顿第二定律,传感器所受的动态力可以投照公式(1)表示为:
F=ma (1)
式中:
m——总有效质量,作用在传感器敏感元件上的所有质量之和,kg;
a——质量块上的加速渡,m/s^2
在参考频率点:传感器灵敏度 S=U/F
灵敏度相对误差△S=(S-Sr)/Sr*100%
相位延迟△∮=∮u-∮a
正弦力法
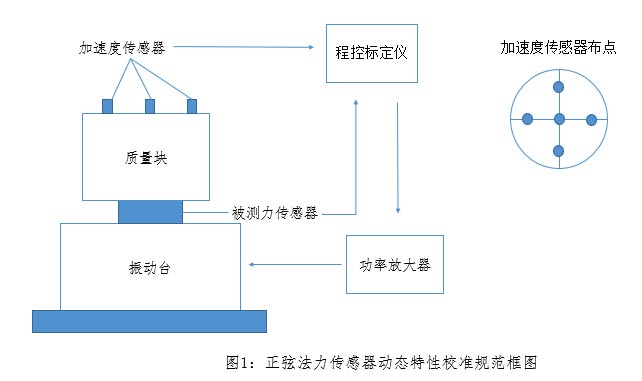
正弦力校准系统如图1所示,被校力传感器安装在电磁振动台上,质量块连接在力传感器上。正弦力标准装置是采用五个加速度传感器测试质量块顶面加速度。力传感器信号和加速度传感器信号都被程控标定仪采集后转换为数字信号。程控标定仪输出信号经过功率放大器放大后驱动振动台工作。各模块同步工作,同时进行数据处理,获得校准结果。
冲击力法
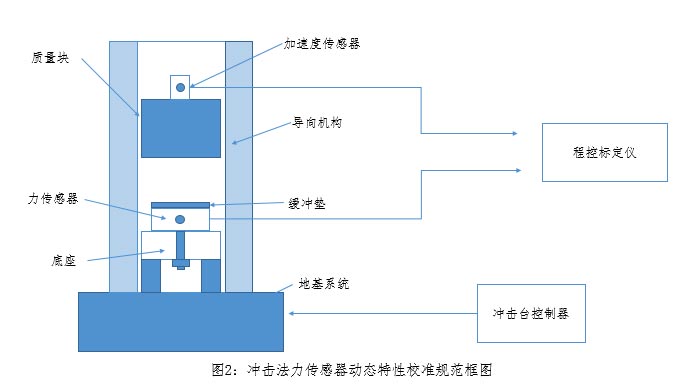
冲击力校准系统如图2所示,被校力传感器安装在冲击台底座上,质量块上连接加速度传感器。力传感器信号和加速度传感器信号都被程控标定仪采集后转换为数字信号。在动态力传感器量程范围内选,用冲击力标准装置对动态力传感器进行校准。对于选择的每个测量点,在冲击力标准装置的同一高度,连续冲击3次。各模块同步工作,同时进行数据处理,获得校准结果。